ARViS: A bleed-free multi-site automated injection robot for accurate, fast, and dense delivery of virus to mouse and marmoset brains (ARViS:マウスとマーモセットの脳にウイルスを正確、迅速、高密度に注入する出血確率の低いのマルチサイト自動注入ロボット)
Shinosuke Nomura, ShinIchiro Terada, Teppei Ebina, Masato Uemura, Yoshito Masamizu, Kenichi Ohki, Masanori Matsuzaki, Department of Physiology, Graduate School of Medicine, The University of Tokyo, Tokyo, 113-0033, Japan, Brain Functional Dynamics Collaboration Laboratory, RIKEN Center for Brain Science, Saitama, 351-0198, Japan, International Research Center for Neurointelligence (WPI-IRCN), The University of Tokyo Institutes for Advanced Study, Tokyo, 113-0033, Japan
Summary
Genetically encoded fluorescent sensors continue to be developed and improved. If they could be expressed across multiple cortical areas in non-human primates, it would be possible to measure a variety of spatiotemporal dynamics of primate-specific cortical activity. Here, we develop an Automated Robotic Virus injection System (ARViS) for broad expression of a biosensor. ARViS consists of two technologies: image recognition of vasculature structures on the cortical surface to determine multiple injection sites without hitting them, and robotic control of micropipette insertion perpendicular to the cortical surface with 50-μm precision. In mouse cortex, ARViS sequentially injected virus solution into 100 sites over a duration of 100-minutes with a bleeding probability of only 0.1% per site. Furthermore, ARViS successfully achieved 266-site injections over the frontoparietal cortex of a common marmoset. We demonstrate one-photon and two-photon calcium imaging in the marmoset frontoparietal cortex, illustrating the effective expression of biosensors delivered by ARViS.
遺伝学的な蛍光センサーは、開発と改良が続けられている。ヒト以外の霊長類の複数の皮質領域に発現させることができれば、霊長類特有の皮質活動の様々な時空間ダイナミクスを測定することが可能になる。ここでは、バイオセンサーを広範囲に発現させるための自動ロボットウイルス注入システム(ARViS)を開発する。ARViSは、皮質表面の血管構造を画像認識することにより、複数の注入部位をぶつけることなく決定する技術と、マイクロピペットを皮質表面に垂直に50μmの精度で挿入するロボット制御の2つの技術から構成される。マウスの皮質では、ARViSは100分かけて100部位にウイルス液を順次注入したが、1部位あたりの出血確率はわずか0.1%であった。さらにARViSは、コモンマーモセットの前頭頭頂皮質で266部位への注入に成功した。マーモセット前頭頭頂皮質における1光子および2光子カルシウムイメージングを実証し、ARViSによって送達されるバイオセンサーの効果的な発現を示す。
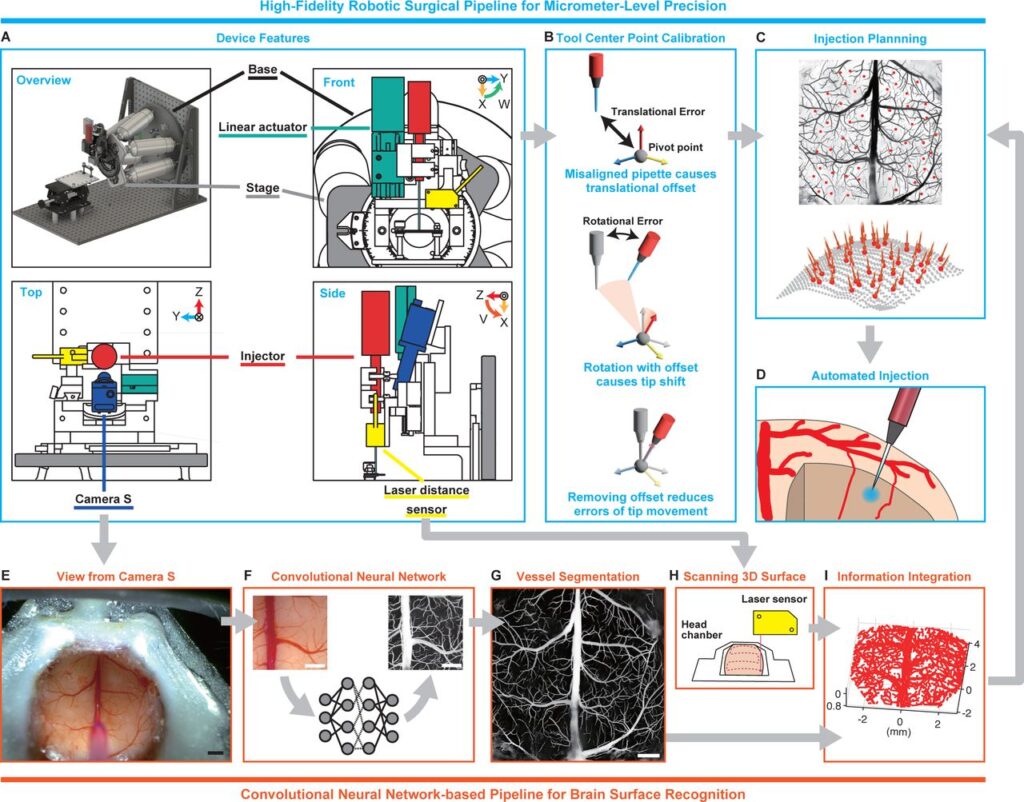
ロボット技術: 図1A-Dに示されているように、ロボット技術は、複数のウイルス注入部位にマイクロピペットを正確に、滑らかに、そして逐次的に挿入することを可能にする。このシステムでは、6自由度を持つ六脚ロボットのベースプレートが垂直面に平行に机に固定されている。ロボットのステージは、マイクロピペット、赤外線レーザー距離センサー(3Dの皮質表面形状を測定するため)、そして皮質血管を画像化するCMOSカメラ(カメラS)に接続された注射器に取り付けられています(図1A)。頭蓋骨を除去された麻酔動物は、ベースプレート上の頭部固定装置に設置され、皮質表面と注入部位はロボットベースシステムフレーム{B}内のXYZ座標で決定される。そして、溶液で満たされたマイクロピペットは、XYZの動き、V回転(Y軸に沿って)、W回転(Z軸に沿って)の組み合わせにより、ロボットの制御下で各部位に挿入される。
画像認識技術: 図1E-Iに示されているように、画像認識技術は、皮質表面の血管に当たらないように、脳皮質の複数のウイルス注入部位を決定するために使用される。
本研究では、非ヒト霊長類の複数の皮質領域に遺伝子発現フルオレセントセンサーを広範囲に発現させるため、自動化されたロボットウイルス注入システム(ARViS)を開発した。ARViSは、皮質表面の血管構造の画像認識技術と、マイクロピペットを皮質表面に垂直に50μmの精度で挿入するロボット制御技術の2つから構成される。マウス皮質では、ARViSは連続して100箇所にウイルス溶液を注入し、出血確率はサイトごとにわずか0.1%だった。さらに、キモザルの前頭頂葉皮質に266箇所の注入に成功し、一光子および二光子カルシウムイメージングにより、ARViSによって投与されたバイオセンサーの効果的な発現を実証した。
遺伝学的に発現させるカルシウム指示薬(GECIs)は、神経科学と機能生物学の分野を革命的に変えた。これらのセンサーが非ヒト霊長類(NHP)の複数の広範囲の皮質領域で均一に発現することができれば、霊長類特有の皮質活動の時空間ダイナミクスを測定することが可能になる。これらのセンサーの蛍光強度変化は、単一ニューロンの解像度で、時には細胞内解像度で検出可能である。
方法: ARViSは、マイクロピペットを皮質の複数のウイルス注入部位に正確かつ滑らかに逐次挿入するロボット技術と、皮質表面の血管を衝突せずに多数のウイルス注入部位を決定する画像認識技術の2つで構成されている。6自由度を持つ六脚ロボットのベースプレートが机に固定され、ロボットのステージは注射器、赤外線レーザー距離センサー、皮質血管を画像化するCMOSカメラに接続されていた。
結果: ARViSの精度は、マウス皮質におけるピペット挿入の精度を検証し、挿入の深さは0.50±0.01mm、絶対的な位置ずれは0.05±0.01mm、実際の注入部位までの横方向の距離は0.038±0.002mmであった。これにより、脳皮質の柔らかい組織でも約50μmの精度で薄くて曲がりやすいガラスマイクロピペットを操作できることが示された。
画像認識の第一ステップ: 麻酔を施したマウスの3D皮質表面(ブレグマを中心とした8×8mmの領域)が赤外線センサーで正確にスキャンされた。この表面スキャンデータに基づき、カメラSと皮質表面との距離が自動的に調整され、新皮質上の62点で細かく焦点を合わせた表面画像が取得された(図S1A)。
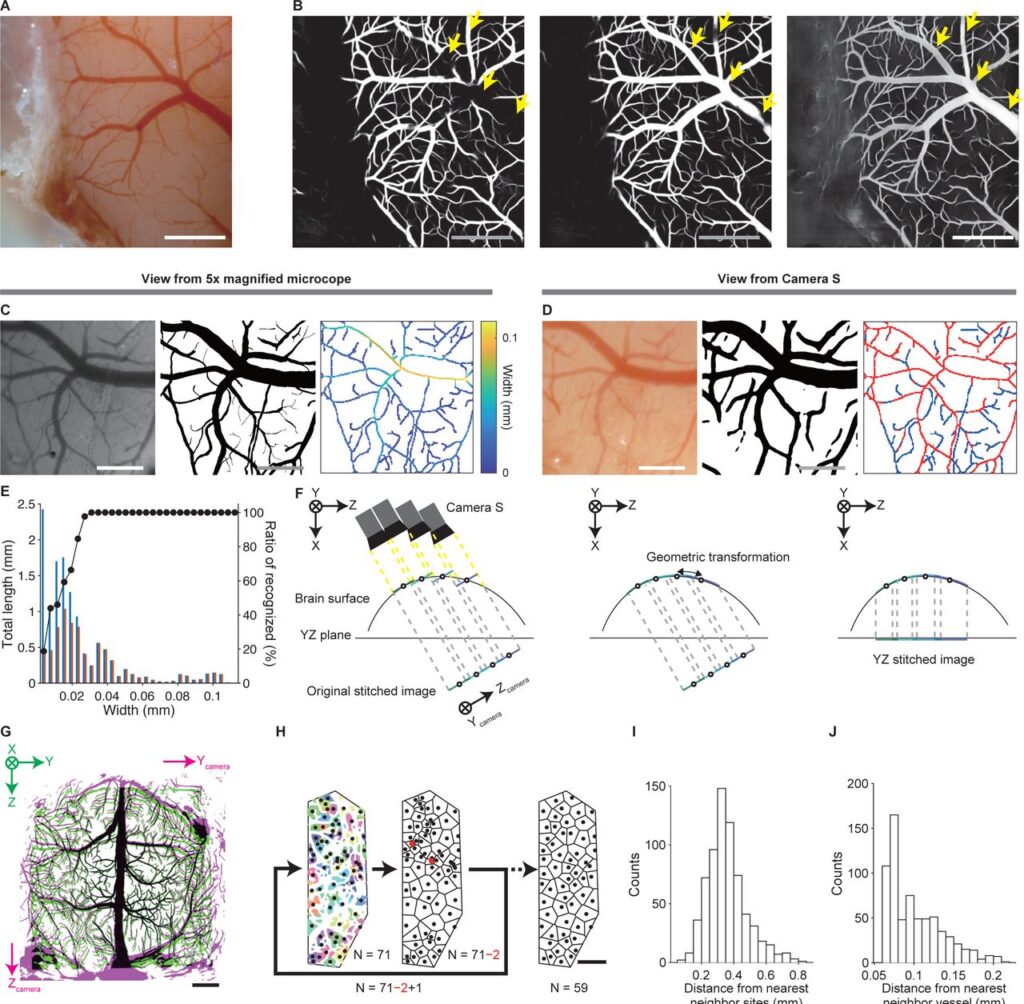
ディープラーニングに基づくセグメンテーション: 各画像の切り抜かれた領域(約3.8×3.8mm;図1F、図2A、図S1B)内の血管が、網膜底部血管のセグメンテーションに元々設計されたディープラーニングに基づく畳み込みニューラルネットワーク(CNN)である空間注意-UNet(SA-UNet)を用いてセグメンテーションされた(図S2A)。このネットワークは、最初にDigital Retinal Images for Vessel Extraction(DRIVE)データセットの網膜底部血管の20枚の画像を使用して訓練された(図S2B、C)。訓練されたモデルは比較的狭い血管ではうまく機能したが、太い血管ではうまく機能しなかった(図2B)。これは、マウスの皮質の血管の幅が10μm未満から200μm以上まで幅広いことを反映している可能性がある。そのため、実験者が決定した血管ラベルを持つマウス脳皮質の血管の追加6枚の画像を使用してSA U-Netを再訓練した(図S2D、E)。この追加により太い血管の検出が改善されたが、一部は未検出のままだった(図2B)。
結果の詳細:
- 精度の検証: マウス皮質でのARViSのピペット挿入の精度を検証した。この実験では、注入の目標深さを皮質表面から0.5mmに設定し、注入深さは0.50 ± 0.01mm(平均 ± 標準誤差、n = 32サイト、1匹のマウスから)と推定された。絶対的な位置ずれは0.05 ± 0.01mmで、各ターゲット注入部位から実際の挿入点までの横方向の距離は0.038 ± 0.002mm(n = 32サイト、1匹のマウスから)であった。これらの結果は、脳皮質の柔らかい組織においても、細く曲がりやすいガラスマイクロピペットを約50μmの精度で操作できることを示しています【11†source】。
- 出血リスク: ターゲット注入部位と最も近い血管との距離によって出血リスクが変化する可能性があるため、安全マージン距離が増加するにつれて出血リスク確率がどのように減少するかを調査した。出血リスク確率は、注入部位が血管構造に対応する割合としてシミュレートされ、安全マージン距離を1つの皮質画像で設定したときに決定された120個のターゲット注入部位に確率的に変位を加えた。その結果、安全マージン距離が60μm以上であれば出血リスク確率はほぼゼロになることがわかり(例えば64μmで0.85 ± 0.09%)、したがって安全マージン距離は65μmに設定された【12†source】。
- マウス背側皮質への複数注入: ロボットは、ターゲット部位の3D座標に沿ってピペットを移動させ、その部位で垂直線上に先端を挿入し、流体を注入した後、次のターゲット注入部位上に移動する。7匹のマウスで合計679回の注入を行った結果、注入部位の8.43% ± 2.24%で短時間の出血が発生したが、この短時間の出血は、開始後30秒以内に止まるものと定義された。一方、30秒以上続く長時間の出血は、脳腫脹を引き起こしたり、皮質表面の血管構造を変えたりするため、止血処置が必要だった。7匹のマウスでの長時間の出血は、注入部位のわずか0.11% ± 0.11%で発生し、このことから、3D皮質表面の血管構造の推定、2D血管セグメンテーション画像内の注入部位の決定、ガラスマイクロピペットの3D操作が非常にうまく機能していると結論づけられた【12†source】。
- マーモセット前頭頂葉皮質への複数点注入: マーモセットの成熟した皮質に広範囲のカルシウムイメージングを適用するために、ARViSを使用して複数点の注入を行った。マーモセットの右前頭頂葉皮質(16×8mm)の合計266箇所に、GECI発現を高めるためのテトラサイクリン誘導型遺伝子発現システムを使用して、2種類のAAVを混合して注入した。全注入プロセスは3つのサイクルに分けられ、各サイクルでキャリブレーションが行われた。7週間後に、注入部位の14×7mmエリア全体で均一な蛍光発現が観察された。そして、目覚めた頭部固定状態で広範囲の一光子カルシウムイメージングを3セッションにわたって行い、マーモセット前頭頂葉皮質における異なる動きの異なる表現が明確に示された。
Discussion: 本研究では、マウスとマーモセット(キヌザル)の背側皮質に連続的な多点注入が可能な自動注入システムを開発した。注入点の精度は水平軸および垂直軸で50μmであり、止血処置を必要とする長期出血の確率は注入ごとにわずか0.1%だった。また、マーモセットでの広範囲のカルシウムイメージングにより、このシステムがセンサータンパクの広範囲な発現を可能にすることが示された。
本システムの限界: ARViSの限界には、ガラスピペットの位置の校正に90分かかること、各ピペットの溶液容量が約4μLと限られていることが含まれる。現在使用されている注射器は、ロードできるウイルスの量に制限がある。この問題は、大容量のシリンジを注射器として使用することで解決できる。また、AAV注入が始まった後の表面景観の変形に対応できないという問題もある。これは、注入プロセス中に表面を定期的にスキャンするか、ピペットを挿入する直前にターゲット注入部位の位置を確認することで解決できるが、これらのステップは必要な時間を増加させる可能性がある。ARViSシステムは、精度と速度のトレードオフを考慮してさらに改善される必要がある。
